Da ein gut funktionierendes GPS (Globales Positionsbestimmungssystem) für Quadrocopter wichtig ist, habe ich mich für den u-blox NEO-M8N aus der neusten Generation mit einer 35mm GPS großen Taoglas Antenne und HMC5983 Compass entschieden.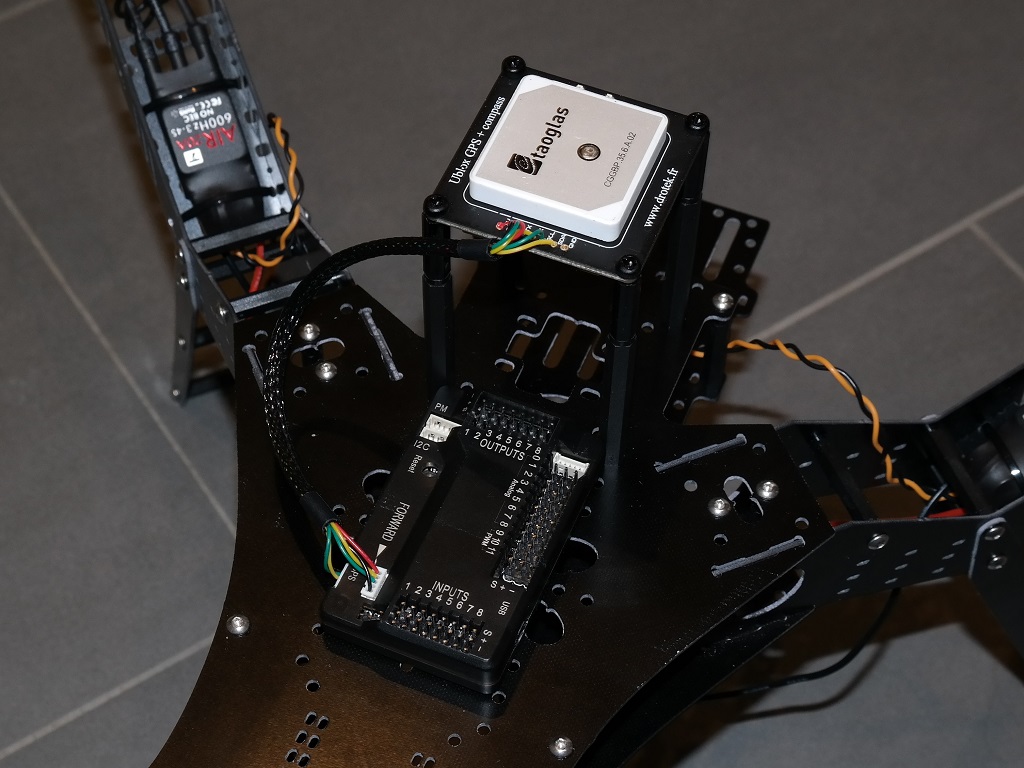
Heute habe ich es dann endlich nach Stunden der Verzweiflung (so verzweifelt war ich schon laaaange nicht mehr) und Hilfe aus einem Forum geschafft das u-blox NEO-M8N GPS + HMC5983 Compass Modul in der XL Variante von drotek.fr an meinem HK ArduPilot Mega 2.7 Flugcontroller zum laufen zu bringen.
Technische Daten vom u-blox NEO-M8N GPS + HMC5983 Compass
Das Modul (Platine) ist 50 x 50 mm groß und hat einen Lochabstand von 45 mm. Das Gewicht ist mit ca. 40 Gramm (habe leider erst nach dem Kabel anlöten gewogen) nicht gerade wenig aber die große Antenne wiegt halt etwas.
 Es hat einen USB Anschluss für die Konfiguration, zwei Buchsen für GPS und Kompass sowie Lötaugen zum direkten Verkabeln.
Es hat einen USB Anschluss für die Konfiguration, zwei Buchsen für GPS und Kompass sowie Lötaugen zum direkten Verkabeln.

Das u-blox NEO-M8N Modul kann mehrere GPS System gleichzeitig empfangen. Darunter fallen unter anderem das uns hauptsächlich bekannte NAVSTAR (US), gefolgt von GLONASS (Russland) und BEIDOU (China). Die 35mm Taoglas Patch Antenne ist entsprechend auf diese GPS System optimiert.
Das Modul besitzt zur Unterstützung (Speicherung der letzten Satelliten) einen kleinen Akku der für einen schnellen Start sorgen soll. Zudem besitzt es einen Spannungsfilter, LNA und einen SAW Filter. Sehr praktisch ist, dass über einen USB Port das GPS Modul direkt am PC angeschlossen und mit der u-blox Software darauf zugegriffen werden kann.
Ein kleines aber nicht unwichtiges Bauteil ist der HMC5983 Magnetometer oder anders gesagt ein 3-Achsen Digital Compass IC der mit auf der Platine sitzt. Der Unterschied zwischen dem neueren HMC5983 und dem sonst oft genutzten HMC5883L ist eine höhere Abtastrate und Temperatur kompensierte Daten. Wenn ich es richtig gelesen habe ganz nett aber nicht wichtig bzw. bemerkbar.
u-blox Software (u-center)
Um sich mal anzuschauen welche Satelliten über uns fliegen und auch um die einmalige Grundkonfiguration vorzunehmen, kann man die sich das u-center installieren. Die aktuelle u-center Software findet ihr auf der u-blox Seite. Nachdem die Software installiert, gestartet und das GPS Modul per USB verbunden wurde, kann es auch schon losgehen. Zuerst wählt man den virtuellen Com Port. Empfohlen wird den Zauberstab mit anzuwählen damit automatisch die Baudrate eingestellt wird. In meinem Fall liegt sie Default bei 9600 Baud.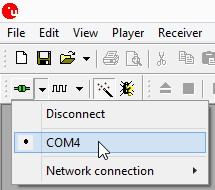
Falls man nach kurzer Zeit noch nichts sieht, einfach die F9 Taste drücken um das Message Menü zu öffnen und dann dort die Child Messages vom UBX Protokoll aktivieren. Danach sollte die Software auch Satelliten anzeigen oder ihr sitzt im Bunker. 🙂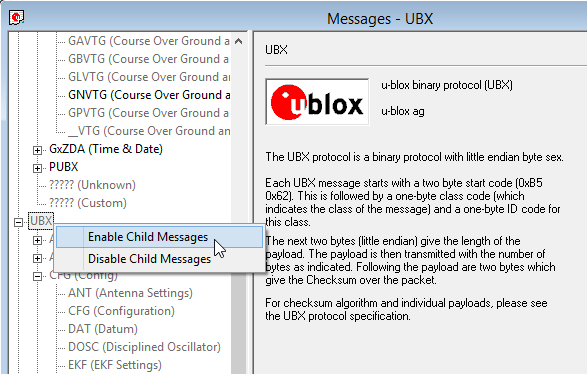
Wenn ihr alles richtig eingestellt habt sollten jetzt Satelliten angezeigt werden.
Ich habe in diversen Beiträgen gelesen, dass man die Baudrate anpassen soll damit das GPS vom APM erkannt und eingerichtet werden kann. Nach jeder Änderung unten auf “Send” drücken!
Scheinbar kann der APM auch nicht die Abtastrate ändern, somit sollte diese auch noch angepasst werden.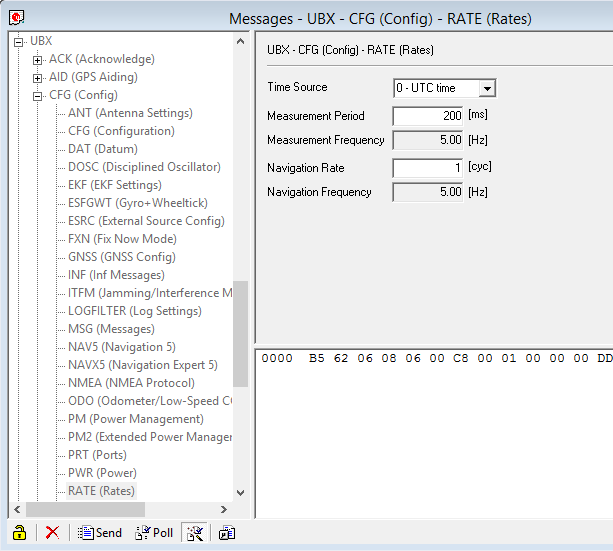
Jetzt könnt ihr das GPS an dem APM anzuschließen.
Verkabelung und Konfiguration
Die Verkabelung war im Endeffekt der schwierigste Teil. Was ich alles versucht habe erzähle ich hier erst gar nicht, sondern gleich wie man es richtig macht. Da das GPS und Kompass Modul in der XL Variante Lötaugen besitzt, habe ich mich für diese Variante entschieden. Der Anschluss kann aber genauso gut über die Buchsen erfolgen. Diese sind übrigens wie die Lötaugen gut beschriftet. Ich habe mal Bilder angefertigt auf dem hoffentlich gut zu erkennen ist wie alles verbunden wird.

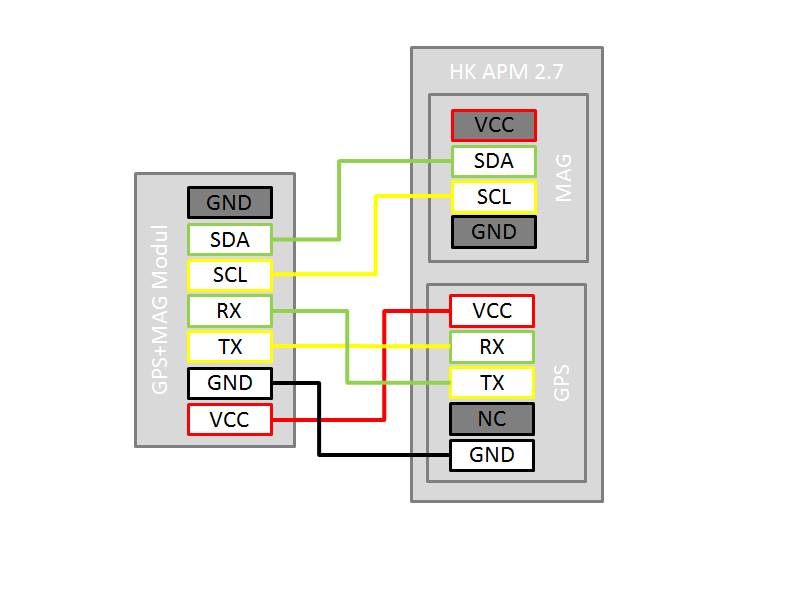
Achtung! Es handelt sich hierbei um einen HK APM 2.7 der (wie ich leider zu Anfang nicht wusste) eine andere Pin Belegung als z. B. ein APM 2.5 oder APM 2.6 und zudem einen Jumper hat um den internen Kompass zu deaktivieren.
Wie alles im Mission Planner eingerichtet wird, schreibe ich mit der restlichen Konfiguration des Quadrocopters gesammelt in einem extra Beitrag. Das Wichtigste ist die Ausrichtung, hier sollte ROTATION_ROLL_180 bzw. APM with External Compass gewählt werden, vorausgesetzt natürlich ihr habt das gleiche Modul und es ist wie auf dem ersten Bild installiert.
Welches GPS kaufen?
Ich habe mich wirklich gut umgeschaut und es ist nicht einfach das richtige GPS Modul zu finden. Von u-blox (Scheinbar der einzige Hersteller der passende Module baut?!) gibt es viele Module aber nur grob 4 davon (NEO-6M / LEA-6H / NEO-7M / NEO-M8N) sind mir im Zusammenhang mit Quadrocopter GPS Systemen aufgefallen wobei die 6er Reihe scheinbar schon abgekündigt ist.
Auf den Bildern sehen die GPS Module immer ziemlich gleich aus aber die GPS Antennen gibt es in mehreren größen (18 / 25 / 35 mm) und dementsprechend groß sind auch die Platinen. Damit man sich ein Bild vom Größenunterschied machen kann habe ich mal zwei GPS Platinen nebeneinander gelegt.

Fazit: Ich würde mir wieder das u-blox NEO-M8N GPS + HMC5983 Compass als XL Variante von der Firma Drotek kaufen. Mir gefallen der USB Port und die Lötaugen sehr gut. Eine kleinere Antenne soll zwar nicht viel schlechter sein aber sicher ist sicher. 🙂
Wie immer meldet euch gerne bei mir wenn ihr einen Fehler findet oder eine Frage habt.
Hallo netter aufschlussreicher Beitrag.
Gilt dieser Anschlussplan auch für eine normales Neo M8N Modul?
Was gibt der HK Pilot 2.7 denn für Spannung raus…3.3-5 V?
Ich glaube 5 V für externe Module sind zu viel.
Danke im Vorraus
MfG
Hallo,
der Anschlussplan sollte grundsätzlich auch für andere GPS / Kompass Module passen, nur die Reihenfolge stimmt dann sehr wahrscheinlich nicht mehr. Der HKPilot Mega 2.7 arbeitet wie andere Versionen mit beiden Spannungen und gibt z. B. am I2C Kompass Connector 3.3V (die beim Drotek Modul nicht benötigt werden) und am GPS Connector 5V aus. Aufpassen, beim HKPilot Mega 2.7 sind VCC und GND am GPS Connector vertauscht! Da bin ich zuerst auch drauf reingefallen!
GPS (Seriell) und Kompass (I2C) sind zwar oft auf einer Platine aber zwei unterschiedliche Module! Werden beide Module mit der angegebenen Spannung versorgt, was z. B. beim Drotek GPS + Kompass Modul einmal 5V vom GPS Connector sind, müssen nur die Daten Pins entsprechend verbunden werden.
Achtung: Alle Angaben ohne Gewähr. Bitte immer den passenden Schaltplan konsultieren!
Viele Grüße
Stefan Nikolaus
Habe mich nach etlichen Recherchen und lesen von Foren auch für die XL-Variante von Drohte entschieden.
Ist vor 2 Tagen eingetroffen, läuft soweit, findet recht zügig ein ordentliche Anzahl von Satelliten, aber…
Die Kompass-Windrose zeigt “Hausnummern”. Soll heißen, mir scheint die Abfrage des Kompassmoduls erfolgt entweder gar nicht oder sporadisch. Muss ich noch etwas einstellen? Und wenn ja , wo?
Für einen Tipp wäre ich dankbar.
Danke und Grüße aus Nordhessen
Rolf
Hallo Rolf,
ich gehe mal davon aus das du die Kompass-Windrose in der u-blox Software meinst?! Diese hat nichts mit dem auf der Platine verbauten HMC5983 Kompasschip zu tun. GPS und Kompass sind außer der Stromversorgung getrennt voneinander auf der Platine und nutzen auch unterschiedliche Protokolle (GPS seriell und Kompass I²C). Die Himmelsrichtung wird denke ich durch Bewegung ermittelt indem der Kurs aus der vorherigen zur aktuellen Position berechnet wird.
Wenn ich jetzt völlig daneben gelegen habe und du etwas ganz anderes meintest dann melde dich einfach nochmal. Schreib am besten auch gleich dazu wofür und wie du das ganze testest.
Viele Grüße
Stefan
Hallo Stefan,
ich war auf der Suche nach einem neuen, anderen GPS-Modul für meinen Quadcopter, weil der verbaute recht unterschiedlich, schlecht auf Satelliten reagiert.
Wie gesagt, nach etlichen Recherchen / Foren habe ich mich für die XL-Variante von Drohte entschieden.
Vielleicht habe ich es überlesen, aber ich dachte halt, daß alle Werte mit der u-blox-Software ausgelesen und dargestellt werden.
In den nächsten Tagen werde ich das Drotek-Modul auf meinen Copter montieren, verkabeln und dann schaue ich weiter.
Vielen Dank für die schnelle Antwort
Grüße aus Nordhessen
Rolf
So, hat doch länger gedauert als erwartet. Das Drotek XL-Modul endlich auf meinem Quadcopter montiert und den ersten Flug absolviert. Alles soweit okay und die Satellitenfindung ist auch auf der grüne Wiese schneller. Nach rund 2 Minuten war der Copter startklar, was in der Vergangenheit mit dem anderen GPS-Modul mit kleinerer Antenne und dem ublox6-Chip deutlich mehr Zeit in Anspruch genommen hat.
Bin mit dem Modul sehr zufrieden.
Beste Grüße
Rolf
Hallo Stefan,
ich habe mir auch von Drotec ein Paar NEO-M8N GPS + HMC5983 geholt und möchte diese an dem APM Pro und APM 2.6/2.7 anschließen.
Mir geht es um die Einstellungen, die ich am NEO-M8N GPS + HMC5983, die ich in der u-center Software für dieses GPS vornehmen muss.
Frage, was muss ich wo genau einstellen?
Oder sind das genau die Werte, die in deinen Bildern schon angezeigt werden?
Muss ich sonst noch Einstellungen in der Software vornehmen?
Würde mich sehr über eine Antwort freuen.
Mit freundlichen Grüßen
Volker Mrozek
Hallo Volker,
wenn du der Anleitung bzw. dem Bildern folgst, solltest du eigentlich zum Ziel kommen. Weitere Einstellungen musst du eigentlich nicht vornehmen, ich wüsste jedenfalls nicht welche. Verwirrend ist z. T. die unterschiedliche Belegung der Pins am jeweiligen APM und ich erwähne es nochmal zur Sicherheit, GPS und Kompass sind zwei unabhängige Module die nur eine gemeinsame Spannungsversorgung haben!
Viele Grüße
Stefan
Hallo Stefan,
vielen Dank für deine schnelle Antwort.
Mit der Belegung der Pins habe ich keine Probleme. Mir geht es nur darum, welche Bautrate und Abtastrate ich für das GPS XXL von Drotek einstellen muss und woran ich dass sehen kann, welche Werte das sein müssen?
Bei dir steht im Bild Bautrate 38400 und eine Abtastrate von 5Hz.
Woher weiß man, was man hier einstellen muss?
Viele Grüße
Volker
Hallo Volker,
die Baudrate von 38400 ist Standard (siehe auch Ardupilot Wiki) und wenn diese nicht stimmt, kann definitiv keine Verbindung zwischen APM und GPS aufgebaut werden. Ob man die Abtastrate selber einstellen muss kann ich dir nicht sagen, schadet aber nicht. Ein paar Einstellungen soll der APM Flightcontroller beim Start selber vornehmen, diese werden aber soweit ich weiß nicht permanent gespeichert.
Meine Einstellungen habe ich aus diversen Foren zusammengesucht. Ich wollte mit meiner Anleitung lediglich meine funktionierenden Einstellungen dokumentieren. Sollte es bei dir nicht funktionieren kann es natürlich noch sein das deine APM oder GPS Version anders reagiert.
Viele Grüße
Stefan
Hallo Stefan,
vielen Dank für deine Hilfe.
Ich hatte mich nur gewundert, das Du etwas eingeben musstest, weil mein Drotek XXL so ohne etwas zu ändern gleich funktioniert hat.
Es ist jedoch gut zu wissen, wenn es mit einem anderen GPS nicht direkt gehen sollte, auf was man es einstellen muss, damit es funktioniert.
Deine Seite mit der Beschreibung von dir finde ich wirklich sehr gut gelungen.
Vielen Dank
Volker
Hallo Stefan
Auch ich finde den Beitrag sehr aufschlussreich.
Auch ich habe bei der Fa. Drotek den u-blox NEO-M8N GPS + HMC5983 Compass als XL Variante bestellt, der hoffentlich in 1-2 Tagen hier eintreffen wird. Die U-Center Software Version 8.20 habe ich bereits installiert und auch schon mit uBlox LEA-6H meine Erfahrungen gemacht.
Nun zu meiner Frage:
Brauche ich für NEO-M8N auch ein FTDI Modul wie er für uBlox LEA-6H benötigt wird, oder kann direkt über den mini USB-Anschluss, der sich auf der Neo-M8N Platine befindet, mit dem PC kommuniziert werden?
Mit freundlichen Grüßen
Michael
Hallo Michael,
du benötigst dafür kein FTDI Modul! Einfach über USB anschließen und den virtuellen COM Port auswählen. Wenn du schon Erfahrungen mit dem u-blox LEA-6H und FTDI Adapter gesammelt hast, brauchst du dir keine Sorgen machen!
Melde dich einfach nochmal wenn es nicht klappt. Ich werde die Tage mein u-blox M8N an meinen neuen Pixhawk Lite Flight Controller anschließen. Bin mal gespannt ob das auf Anhieb klappt. 🙂
Viele Grüße
Stefan
Hallo Stefan,
danke für die schnelle Antwort.
Dann werde ich, sobald mein u-Blox Neo-M8N eingetroffen ist, mit der Arbeit beginnen.
Mit meinen Erfahrungen einen Copter zu bauen, stehe ich noch ziemlich am Anfang. Ich habe mir (leider) eine große Bürde auferlegt, nämlich damit begonnen mir einen Octocopter selbst zu bauen. Nun muss ich da durch.
Der Rahmen ist schon gebaut, die 8 Brushless Motoren und die ESC’s sind montiert und verkabelt, der Sender ist eine Hitec Aurora 9X, der Empfänger ein Hitec Optima 9, FC ist ein 3DR APM 2.6 und GPS wie du ja weißt u-Blox Neo-M8N. Soweit so gut, Gimbal und Kamera kommt später. Mit Mission Planner und U-Center habe ich mich auch schon vertraut gemacht.
Dazu noch 2 Fragen:
1. Frage:
weiter oben hast du geschrieben, dass du über Mission Planner, wie alles eingerichtet wird und über die restlichen Konfigurationen in einem extra Beitrag schreiben möchtest. Kommt dieser Beitrag noch oder habe ich diesen nur nicht gefunden?
2. Frage:
während ich mein FC 3DR APM 2.6 (zunächst ohne GPS) über Mission Planner einrichten wollte, ist mir unter Flight Data aufgefallen, dass beim Bewegen vom FC dieser mir eine Himmelsrichtung anzeigte, obwohl ja eigentlich kein Compass vorhanden bzw. deaktiviert sein sollte. Dazu kommt noch, dass dieser die nördliche Richtung zeigte, statt (wie in Pfeilrichtung bzw. meine Flugrichtung) die südliche Richtung.
Kann die falsch gezeigte Himmelsrichtung in der Parametrierung geändert werden? Wenn ja, wo.
Mit freundlichen Grüßen
Michael
Hallo Michael,
ein Beitrag zum Mission Planner gibt es noch nicht. Ob ich noch einen schreibe, kann ich dir so noch nicht sagen. Vieles wird ja auch schon auf der Ardupilot Webseite erklärt. Aktuell ist das Thema Quadrocopter auch etwas nach hinten gerutscht, was aber nicht bedeutet, dass es nicht weitergeht. Ich habe erst vor kurzem meinen ersten Quadrocopter mit einem selbst geflashten FrSky D4R-II Empfänger (Beitrag folgt in Kürze) ausgerüstet und dabei festgestellt das ein Gimbal der Turnigy 9XR Fernbedienung kaputt ist 🙁 . Zudem habe ich meinem zweiten Quadrocopter mit einem Pixhawk Lite FC ausgestattet und die Tower App mit einem 433 MHz Telemetrie Empfänger getestet. Sehr coole Sache! Auch hierzu wird sicherlich noch ein Beitrag folgen.
Wenn du keinen Kompass installiert hast, kann die Änderung der Himmelsrichtung nur noch mit dem Gyroskop Sensor ermittelt werden. Der weiß nur nicht wo Norden und Süden ist 🙂 . Anders kann ich mir das nicht erklären! Man kann die Ausrichtung vom Kompass anpassen, das musst du aber nur wenn du den Kompass “falsch” eingebaut hast. Wenn du GPS und Kompass eingebaut und kalibriert hast, wird sicherlich die richtige Richtung angezeigt.
Viele Grüße
Stefan
Hallo Stefan,
danke nochmals für die schnelle Antwort.
Die Webseite von Ardupilot habe ich auch schon im Blickfeld bzw. werde diese natürlich nutzen. Sobald das neue GPS Modul eingetroffen ist, werde ich mit dem Einbau und mit der Kalibrierung beginnen.
Viel Erfolg mit all deinen Projekten.
Viele Grüße
Michael
Hallo Stefan,
inzwischen habe ich mein selbst gebauten Octocopter (mit FC 3DR APM 2.6 und u-Blox Neo-M8N) zum Fliegen gebracht. Trotz Kalibrierung über Mission Planner (und ESC’s einzeln kalibriert) driftet der Octocopter leicht weg und kann nur durch sofortigem korrigieren stabil gehalten werden. Ich habe durch Zufall gelesen, dass der FC APM 2.6 zentrisch am Copter verbaut werden muss (Mitte soll im CoG liegen). Stimmt das?? Ich habe den APM 2.6 nämlich seitlich befestigt.
Gruß
Michael
Hallo Stefan,
evtl. hast du meinen letzten Kommentar nicht bekommen und somit versuche ich es noch mal.
Mein letzte Beitrag bzw. Kommentar war am 15. März 2016 und seitdem hat sich einiges getan. Mein Octocopter habe ich nach der Kalibrierung (auch ESC’s) zum Fliegen gebracht. Da mein Octocopter nach dem Start leicht weg driftet bzw. leicht unruhig läuft, habe ich dazu noch eine Frage.
Ich habe in diesem Zusammenhang gelesen, dass der FC APM 2.6 zentrisch also mittig (CoG) am Gestell installiert werden muss. Stimmt das? Mir ist aufgefallen, dass auch du den FC APM 2.7 (Bild 1 ganz oben) zentrisch angeordnet hast.
Gruß
Michael Balzen
Hallo Michael,
wir waren im Urlaub, daher erst die späte Rückmeldung. Ich habe das Hobby Quadrocopter aus Zeitgründen erstmal auf Eis gelegt, versuche aber mit meinem Halbwissen dich vielleicht auf die richtige Spur zu bringen.
Soweit ich weiß muss der APM mittig installiert werden. Ich habe mal gelesen das bei einem Octocopter der APM zu langsam sein kann, genaueres kann ich dir leider nicht sagen. Nebenbei, ich habe mir für meinen großen Quadrocopter einen PixHawk Lite aus China bestellt.
Was hast du für Motoren und Propeller? Gibt es eventuell eine Unwucht und wie stark sind die gemessenen Vibrationen?
Wenn er immer nur in eine Richtung driftet, hast du schon Save oder Auto Trim versucht?
Ich hoffe, ich konnte dir wenigstens etwas weiterhelfen.
Viele Grüße
Stefan
Hallo Stefan,
Urlaub muss sein, trotzdem danke für die Rückmeldung.
Dann werde ich wohl den 3DR APM 2.6 nochmals umsetzen, denn der war seitlich installiert. Das mit dem PixHawk Lite ist eine Variante und die werde ich im Hinterkopf behalten für Später.
Nun zu Deiner Frage:
Die Motoren für meinen Octocopter sind: A2212 15 T 930KV.
Die Propeller für meinen Octocopter sind: Gemfan 10×4.5 Carbonverstärkt.
Die Propeller und die Motoren habe ich ausgewuchtet. Bei den Motoren handelt es sich um preiswertere Modelle, die sich nicht alle gut auswuchten ließen. Zum Ausprobieren sollten es erst einmal preiswertere sein. Aber ich werde demnächst T-Motoren zum Einsatz bringen, die nicht mehr ausgewuchtet werden müssen.
Übrigens, dass mit dem driften, ist unterschiedlich also nicht nur in einer Richtung. Aber die Idee mit dem Save oder Auto Trim ist gut, werde ich mal versuchen.
Viele Grüße
Michael