In den letzten Tage sind immer wieder Bestellungen für den Quadrocopter angekommen.
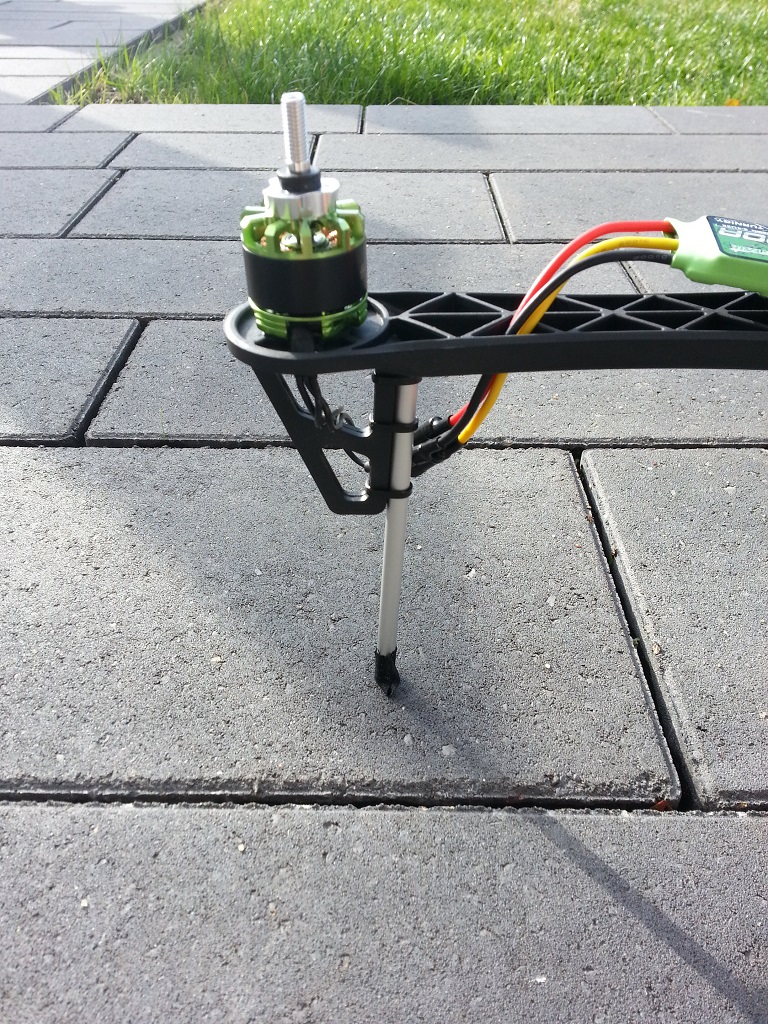
Direkt nach dem Beitrag Teil 2 ist mir aufgefallen das schon etwas fehlt. Schrauben für die Befestigung der Motoren am Rahmen. Nicht ganz unwichtig 😉 . Die kleinen Senkkopfschrauben M3 x 8mm mit TX10 aus V2A waren aber schnell bestellt und passen soweit auch. Ich hoffe nur das meine Wahl die richtige war?!
Die 6 Kanal Fernbedienung mit Empfänger Hobby King 2.4Ghz 6Ch Tx & Rx V2 ist sehr günstig und fühlt sich (ich habe aber keinen Vergleich) auch etwas so an. Die Fernbedienung hat kein Display wie andere, dafür aber eine PC Schnittstelle. Schlechtes habe ich aber nicht gelesen und für den Anfang wird sie sicherlich reichen. Der Empfänger ist ziemlich klein und lässt sich so gut verbauen.

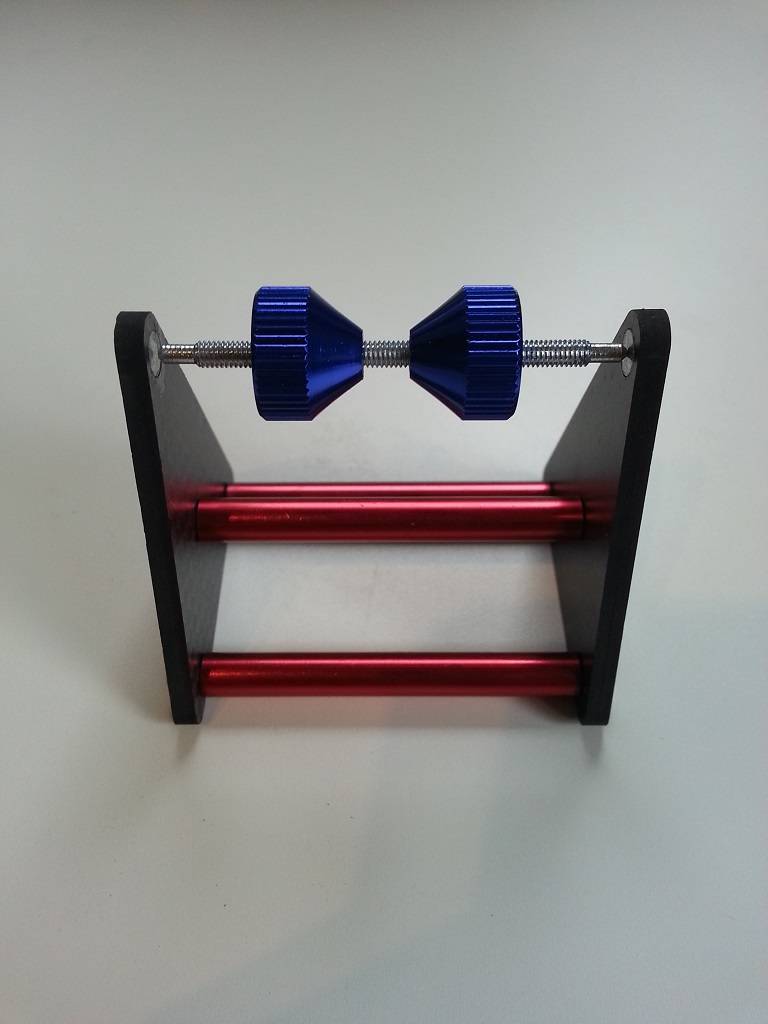
Einen Magnetic Prop Balancer zum Auswuchten der Propeller habe ich mir nach lesen vieler Berichte auch gekauft. Dadurch soll der Quadrocopter ruhiger fliegen und die Motoren nicht so stark belastet werden. Die Qualität hat mich noch nicht wirklich überzeugt, mal schauen ob es trotzdem funktioniert. Wer billig kauft …
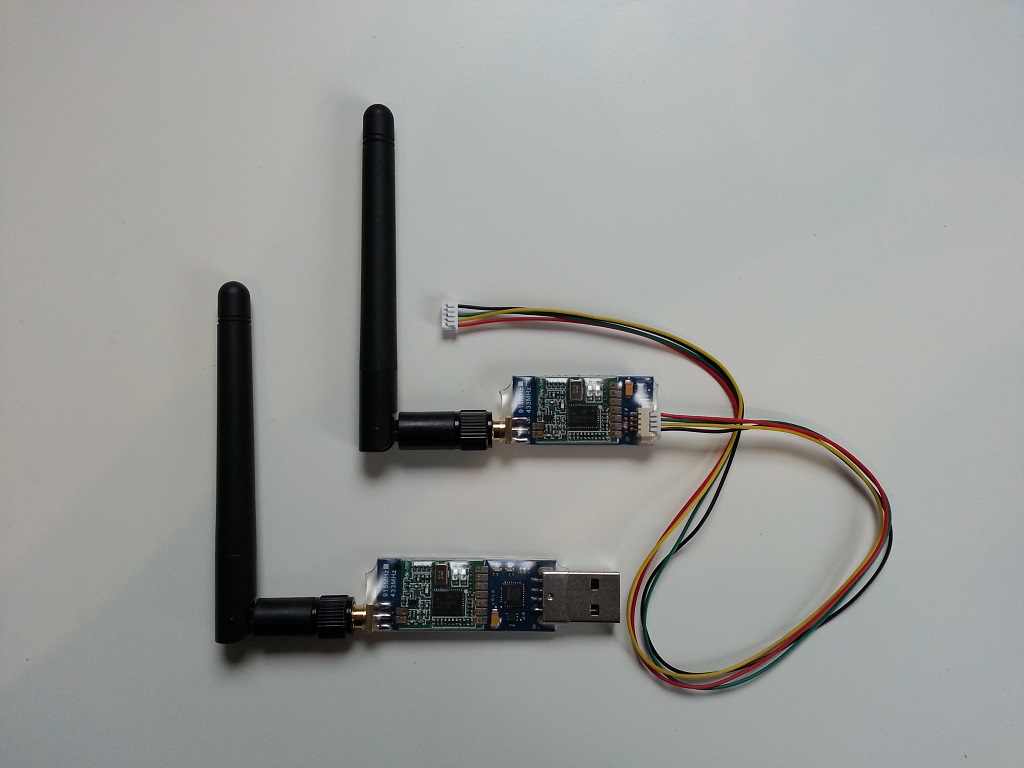
Mit einem Radio Wireless 433Mhz Telemetry Kit können die Flugwerte Online ausgewertet und Einstellungen angepasst werden.
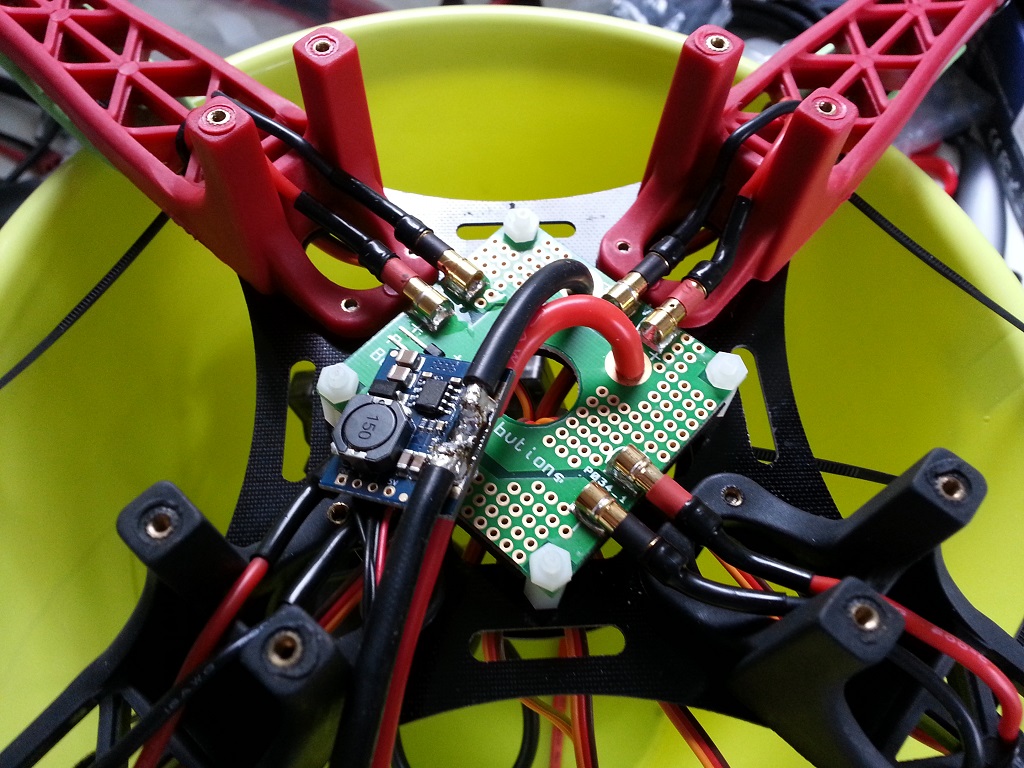
Das Power Distribution Board (PDB) soll die vier ESCs mit Spannung versorgen.
Mit dem 3W 4LEDs LED Indicator Module V1.0 können schnell die Zustände des Quadrocopters visualisiert werden.
Jetzt sind eigentlich alle Teile da und die Montage kann beginnen. Mal schauen was noch so fehlt?!
Update: Wenn ihr euch einen Magnetic Prop Balancer kaufen wollt, dann spart nicht am Geld so wie ich es getan habe! Er funktioniert nicht so gut und zeigt mit Glück eher eine Tendenz an.