Wie ich darauf gekommen bin mir einen Quadrocopter selbst zu bauen, kann ich gar nicht genau sagen. Ich denke, auf der Suche nach Teilen für den Arduino fiel immer mal das Wort Quadrocopter bzw. Arducopter und in mir wuchs der Wunsch nach einem eigenen Quadrocopter.
Nach langer Recherche habe ich mir mal was zum “probieren” zusammengestellt das hoffentlich irgendwann mal abhebt und ganz wichtig auch wieder sicher landet. 😉 Heute sind die ersten Teile angekommen und die mussten natürlich gleich zusammengebaut bzw. ausprobiert werden.
Noch etwas wichtiges vorweg, es wird eine nach § 102 Luftverkehrszulassungsordnung (LuftVZO) vorgeschriebene Haftpflichtversicherung für Luftfahrzeuge im Sinne des § 1 Absatz 2 Nr. 9 Luftverkehrsgesetz (LuftVG) benötigt. Also bevor man anfängt sollte/muss man sich leider auch mit diesem Thema beschäftigen.
Als Rahmen (Frame) für den Quadrocopter habe ich mir ein DJI F450 Clone bestellt. Recht einfach und nicht sooo gut gefertigt (Die Schraubenlöcher musste ich teilweise “freibohren”) aber erst mal ausreichend.

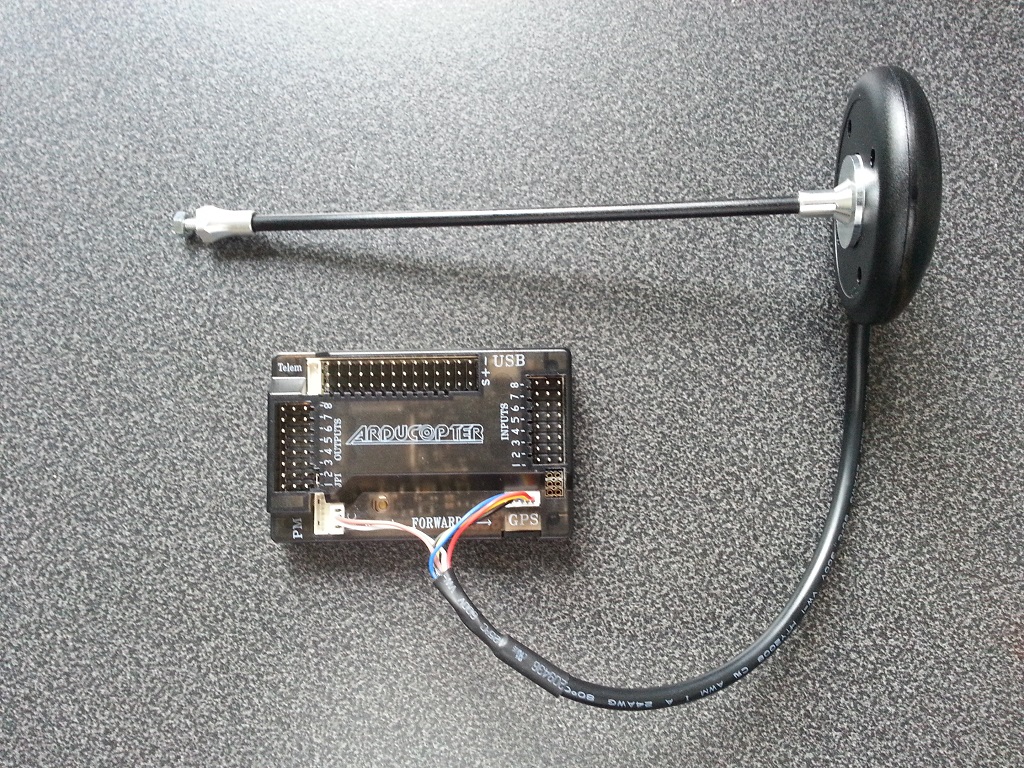
Zeitgleich kam auch die Steuerung (Flightcontroller) an. Hier habe ich mich nach langem überlegen für einen APM 2.6 Clone und passendem Zubehör entschieden. Wichtig für viele Funktionen ist auch der GPS Empfänger und der Kompass. Der GPS Empfänger soll nicht der beste sein aber mal schauen wie es klappt.
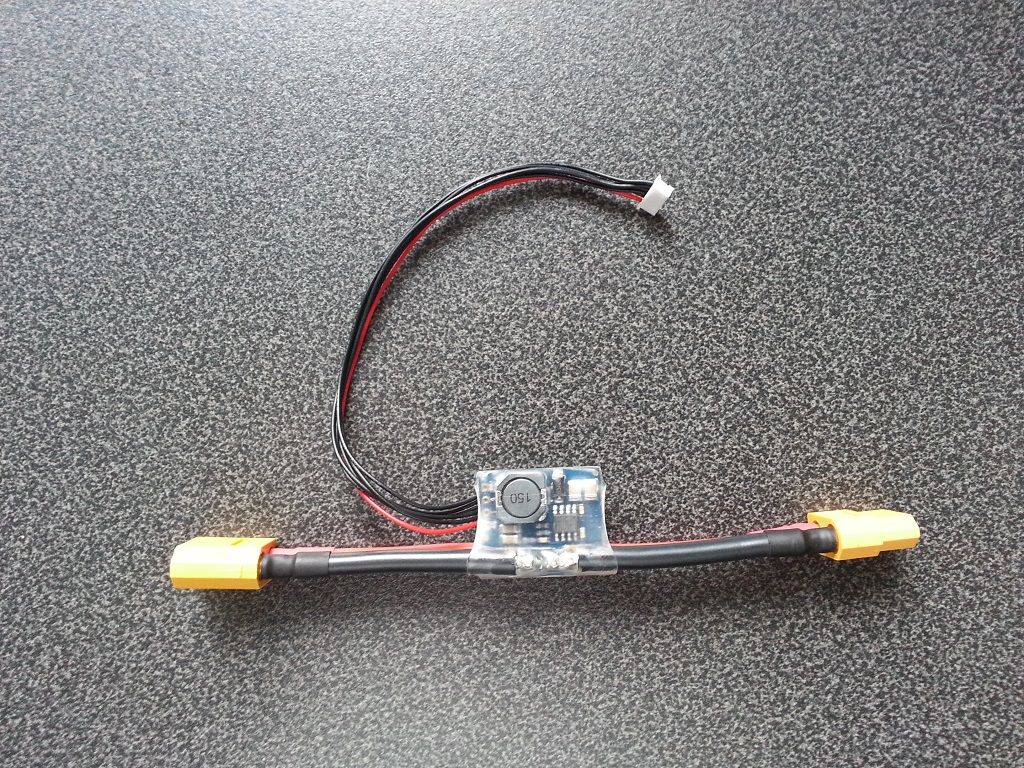
Zusätzlich ein Strom und Spannungssensor über den auch der APM Controller versorgt wird.
Der Controller bzw. die Firmware (externer Link: Ardupilot) hat sehr viele Features und Funktionen. Hier eine kleine Auswahl:
– 14 verschiedene Flugprogramme – Simple, Drift, Position Hold, Loiter, Stabilize, Return to Launch, …
– Viele Sensoren – Intern: Barometer, Gyro, Beschleunigung / Extern: Strom, Spannung, GPS, Kompass, Sonar, …
– Telemetrie – Flugdaten während des Fluges auswerten und Konfiguration anpassen
– Failsafe Modus – Überwacht Throttle, Batterie, GPS, Verbindung zur Ground Station Control
– Autonomer Flug – Quadrocopter fliegt vordefinierte Wegpunkte ab
Auf den Controller gehe ich dann in einem der nächsten Teile näher ein. Jetzt heißt es erst mal warten bis Fernsteuerung, Motorregler (ESC), Motoren, Propeller, Propeller Balancer, Akku, Ladegerät, Telemetrie Kit, usw. angekommen ist.