Mit dem Robonect Hx Modul aus dem Robonect Shop (Externer Link) können wir jetzt endlich auch unseren geliebten und mittlerweile schon vier Jahre alten Husqvarna Automower 430x in unsere Loxone Smart Home Steuerung einbinden.
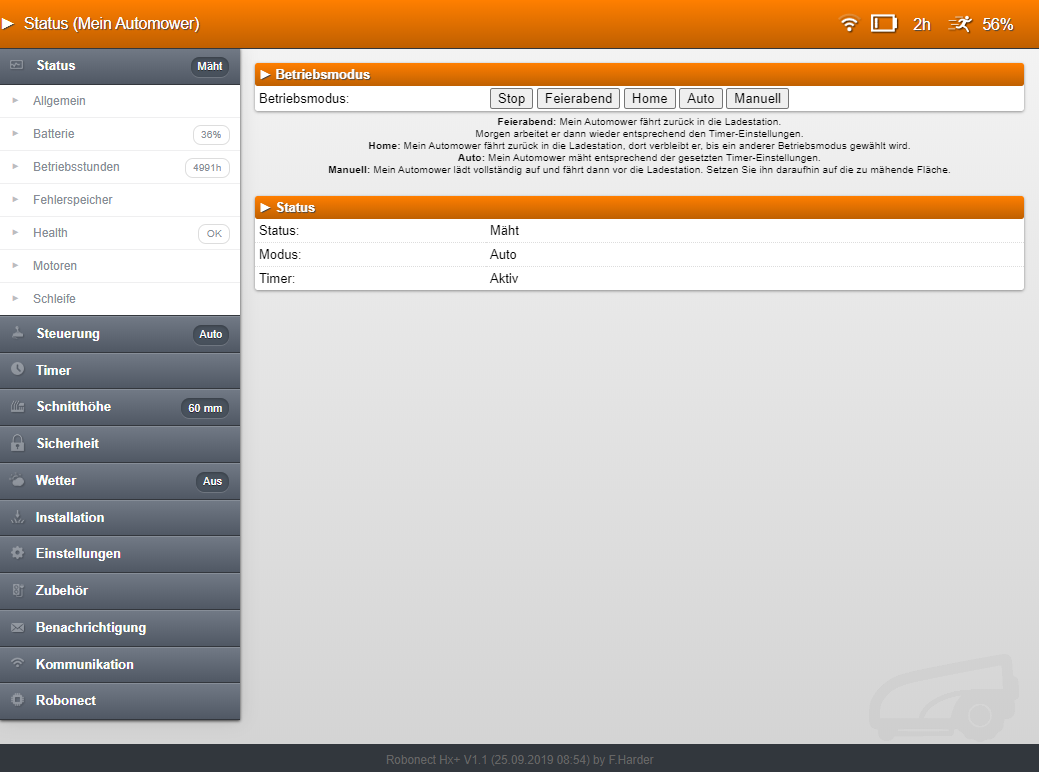
Noch steuern wir nur manuell den Betriebsmodus (Auto, Feierabend und Parken) über die Loxone App und können dort auch den Status einsehen. Die Weboberfläche vom Robonect Hx Modul wird so nur im Fehlerfall oder um die Einstellungen wie Timer oder Schnitthöhe anzupassen benötigt. Das Modul ist auch ohne Smart Home Steuerung eine gelungene Erweiterung vom Husqvarna Automower.
Einbau
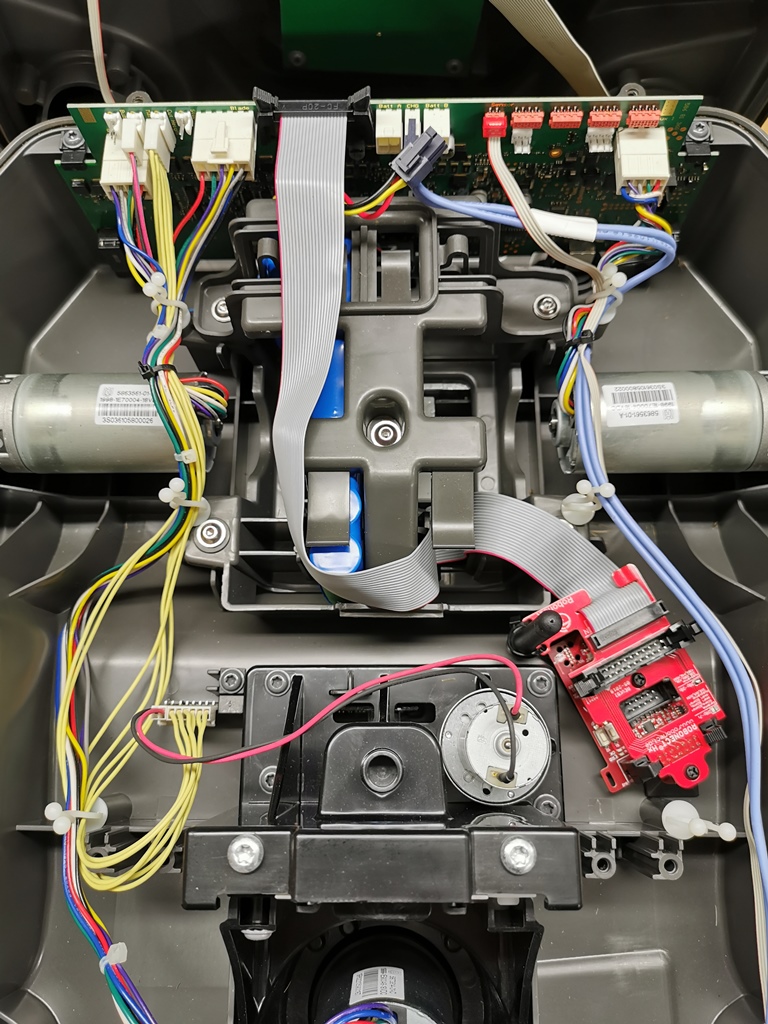
Der Einbau verlief relativ problemlos und schnell. Nach der gründlichen Säuberung habe ich den Automower vorsichtig geöffnet und mich erst einmal orientiert. Wichtig! Bevor ihr loslegt, zuerst den Stecker vom Akku abziehen. Erst dann das Flachbandkabel, welches vom Gehäusedeckel (Display) zur Hauptplatine führt, abziehen. Eine geeignete Stelle zum Einbau war schnell gefunden und dank der Klebepads war das Robonect Hx Modul sicher befestigt. Nachdem alle Flachbandkabel wieder richtig verbunden sind, kann auch der Stecker vom Akku wieder eingesteckt werden.
Wenn unser Automower mal offen ist, habe ich auch gleich die Sicherungsscheibe der Vorderradaufhängung fester gedrückt und die Vorderreifen komplett erneuert. Nach vier Jahren intensiven Betrieb darf auch mal eine Wartung fällig sein.
Einrichtung
Nachdem die Firmware hochgeladen und die Netzwerkeinstellungen durchgeführt wurden, lässt sich wirklich sehr viel über die Weboberfläche konfigurieren und auslesen. Neben der Schnitthöhe, Timer und anderer bereits vom Bedienfeld bekannten Einstellungen, gibt es noch sehr viel neues zu entdecken.
Smart Home
Wenn gewünscht, ist eine Benachrichtigung über Push(over) Dienst, E-Mail oder SMS bei kritischen Ereignissen oder Störungen sowie beim Verschleiß der Klingen schnell eingerichtet. Das funktioniert natürlich auch ohne ein Smart Home!
HTTP Schnittstelle
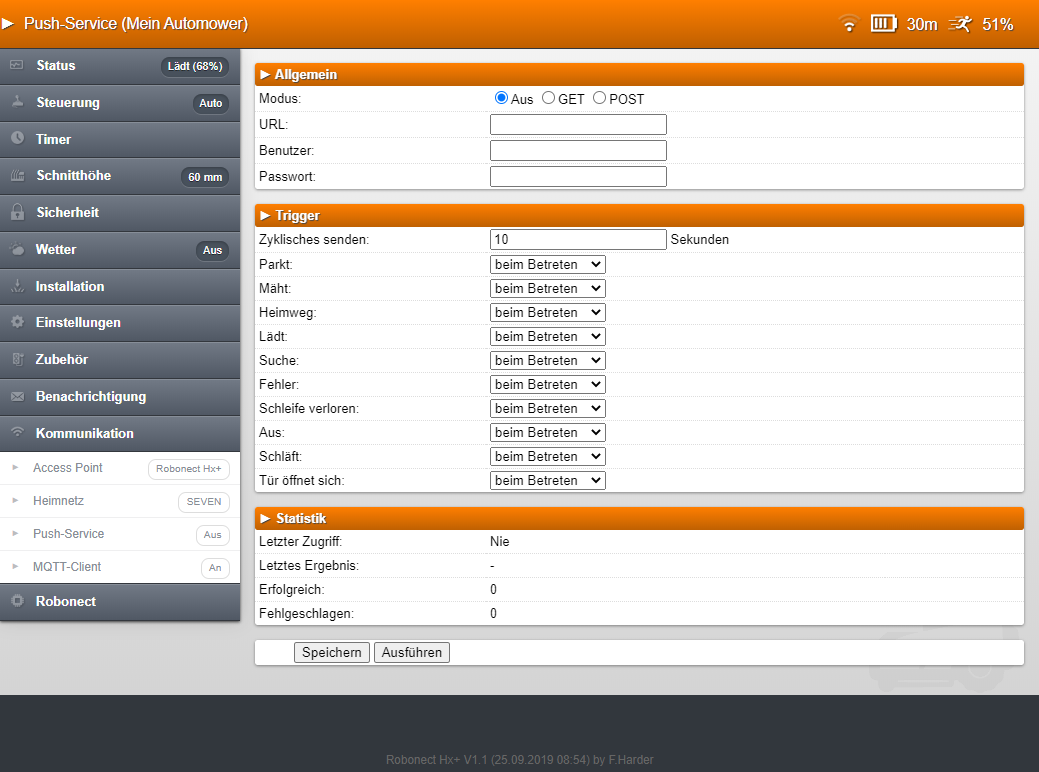
Eine der möglichen Schnittstellen ist über HTTP mit dem Modul zu kommunizieren. Wichtige Informationen über den Status können entweder zyklisch und/oder bei einem Event (Parkt, Mäht, Heimweg, Fehler, …) per GET oder POST an eine URL zugesendet werden.
Eine auslesbare Statusabfrage ist über http://<IP Automower>/xml?cmd=status im XML Format oder über http://<IP Automower>/json?cmd=status im JSON Format erhältlich. Auch für andere “Menüpunkte” sind Details abrufbar. Hierzu einfach das Wort “status” in der URL durch “battery”, “error”, “gps” oder “timer” ersetzen.
Wir beschränken uns aktuell noch auf das auslesen der Informationen wie den aktuellen Status, Akkuladung, Messerqualität und RSSI Wert von der Status Seite und die folgenden wichtigsten Befehle.
Mähen nach Timer
http://<User>:<Password>@<Robonect IP>/xml?cmd=mode&mode=auto
Feierabend bis morgen
http://<User>:<Password>@<Robonect IP>//xml?cmd=mode&mode=eod
Parken
http://<User>:<Password>@<Robonect IP>//xml?cmd=mode&mode=home
MQTT Schnittstelle
Ein MQTT Client ist auch integriert, für uns aber aktuell nicht ganz so interessant. Es sind auch hier viele Daten verfügbar und auch die wichtigsten Befehle sind möglich.
ToDo
Spannend finde ich die GPS Informationen. Damit ist es möglich zu sehen wo sich der Automower gerade befindet und das Ganze ist sogar recht genau. Irgendwie muss ich jetzt noch die GPS Koordinaten mit einem Klick auf einer Karte darstellen können.